|
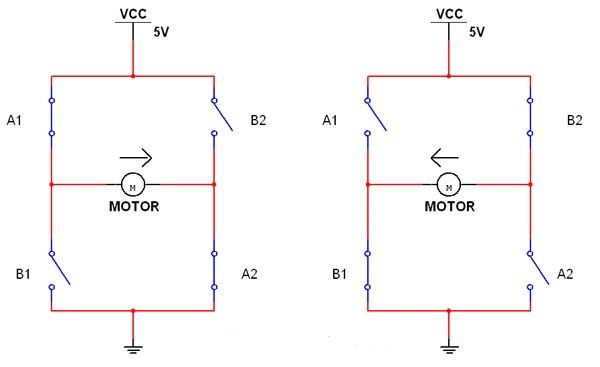
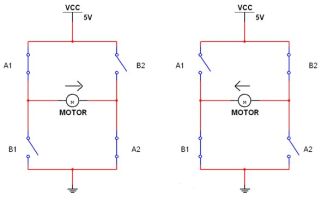
Das Grundprinzip einer sogeannaten H-Brücke besteht im
Zusammenwirken von vier Schaltern, durch die ein
Gleichstrommotor in vier verschiedene Zustände versetzt werden
kann.
Der Motor kann in die Zustände AUS, LINKSLAUF,
RECHTSLAUF und KURZSCHLUSS geschalten werden.
Jedoch besteht
auch die Gefahr eines Kurzschlusses, wenn der Pluspol (VCC) über
zwei geschlossene Schalter direkt mit dem Minuspol
(Masse,Ground) verbunden wird.
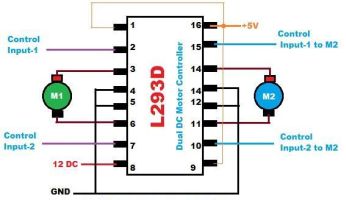

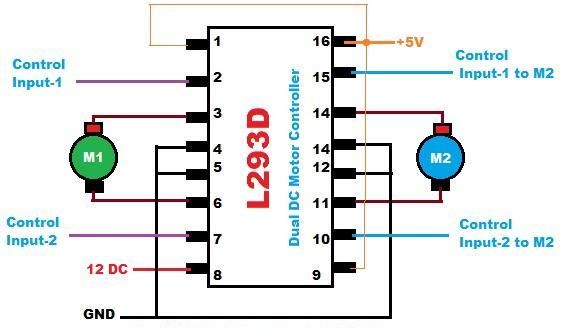
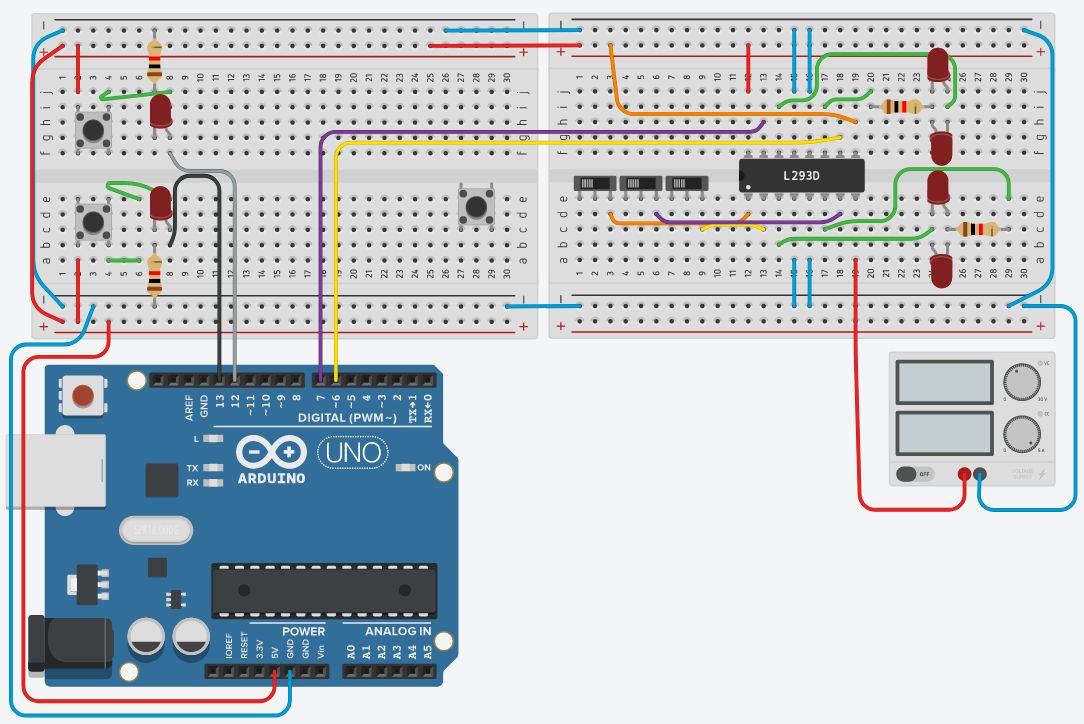
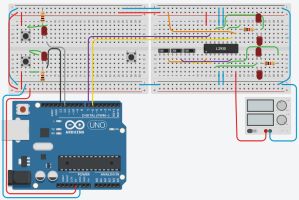
Wir wollen nun den IC L293D kennelernen, welcher 2 H-Brücken
bereitstellt. Statt der Motoren schliessen wir zwei
entgegengesetzt geschaltene LEDs über einen Vorwiderstand an die
Ausgänge an.
So können wir ohne großen Aufwand die Funktion
unserer Schaltungen überprüfen.
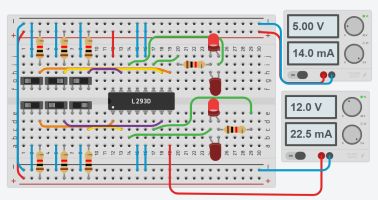
Aufgabe 1 - L293D kennenlernen
Öffne
die Vorlage
robocar und mache dich mit der Funktionsweise der ersten
H-Brücke im L293D vertraut.
Vervollständige die Ansteuerung
der zweiten H-Brücke durch drei weitere Schalter.
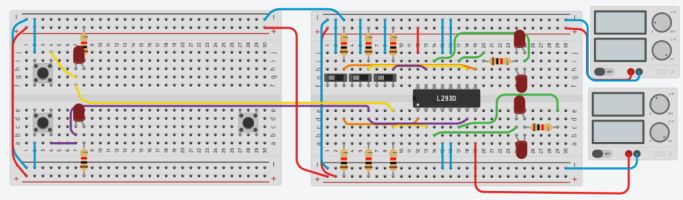
Aufgabe 2 - Fernsteuerung
Nun wollen wir die Steuerung des L293D über eine
drahtgebundene Fernsteuerkonsole auf einem zweiten Steckbrett
realisieren.
Mit dem linken Daumen können wir den linken
Motor in die Zustände HALT, LINKSLAUF und RECHTSLAUF versetzen.
Die LEDs auf der Steuerkonsole dienen dem Nutzer als
Information, das ein Signal an die Steuerung gesendet werden
kann.
Vervollständige die Fernsteuerungskonsole und
ermögliche auch die Steuerung der rechten Motors durch zwei
weitere Taster.
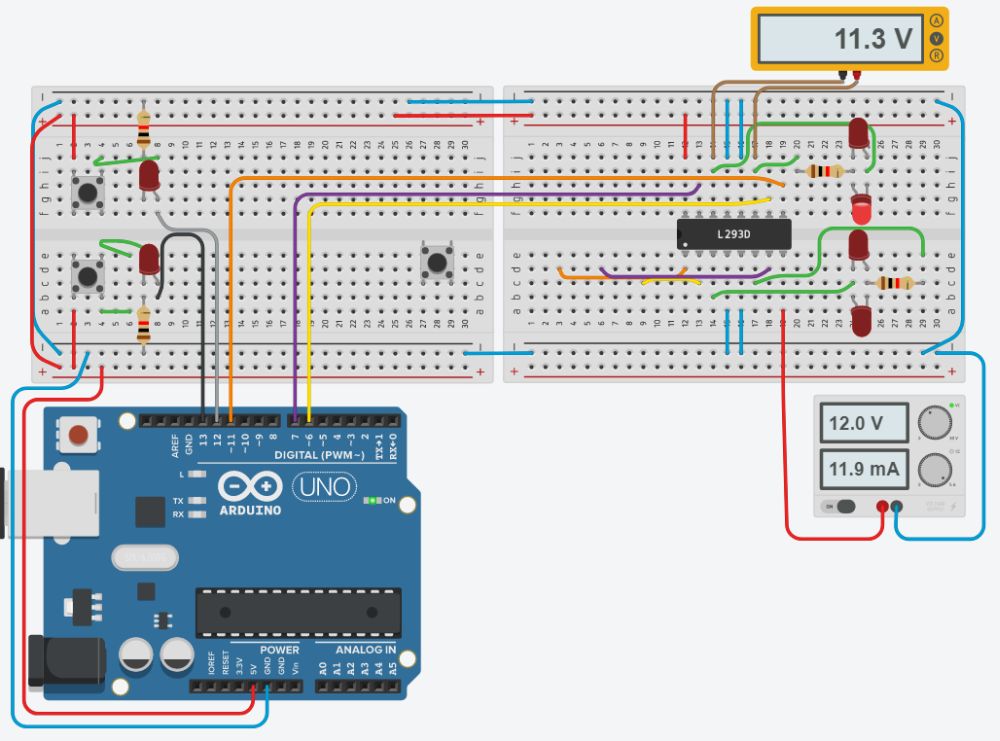
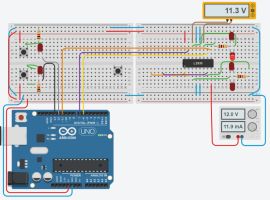
Aufgabe 3 - UNO macht mit
Die
Steuerung wird nicht mehr per Hand sondern über den µC UNO erfolgen.
Bearbeite die
Vorlage
robocar-2 und steuere die zweite H-Brücke im L293D mit dem
Arduino an.
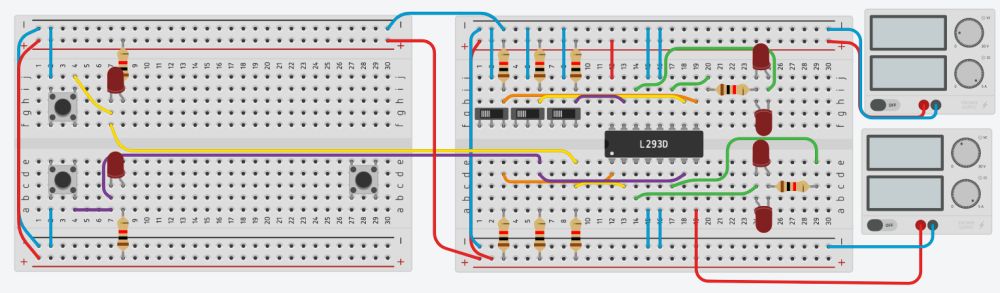
Erweitere deine Schaltung in TINKERCAD entsprechend der
folgenden Abbildung und übertrage das Programm auf deinen UNO.
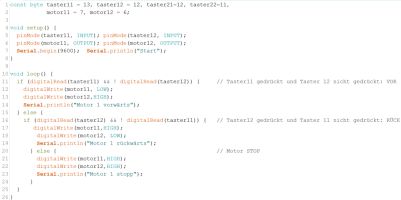 
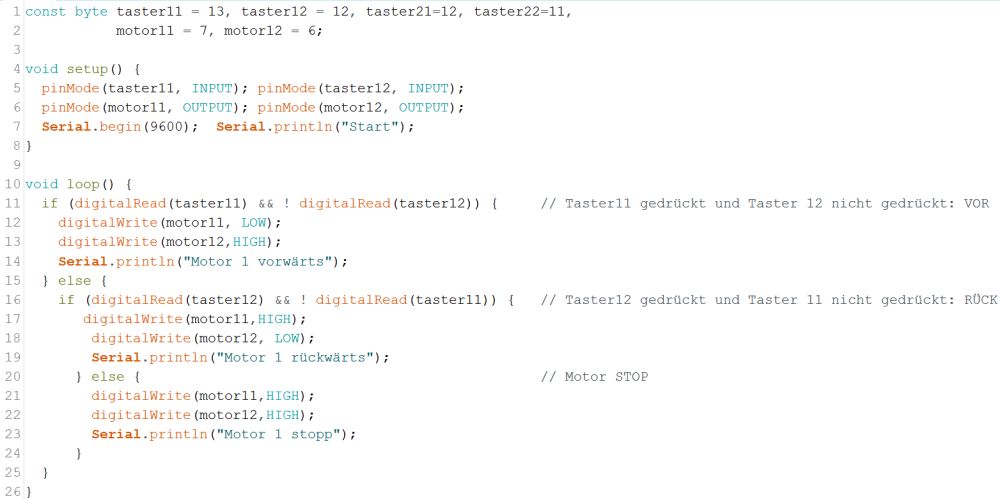
robocar-01.ino
Aufgabe 4 - Neues Bedienungskonzept?
Bisher muss der Fahrer ständig Knöpfchen drücken, damit unser
fiktives Auto rollt.
Finde eine Lösung, in der wiederholtes
Drücken eines Tasters den entsprechenden Motor ein- bzw.
ausschaltet.
Aufgabe 5 - UNO macht Motor Beine
Der UNO kann die Geschwindigkeit eines Motor per
PWM steuern. Mehr dazu gibt
es bald hier!
Dazu muss die Stromzufuhr des Motor
schnell im wieder an- und ausgeschalten werden.
Je länger
die Einschaltdauer zur Ausschaltdauer ist, desto mehr Energie
erhält der Motor und desto schneller und stärker dreht er.
Öffne die Vorlage
robocar-5 und studiere den Programmcode.
Schliesse einen
Gleichstrommotor an, um dich auch auf diese Weise von der
Richtigkeit der Softwarelösung zu überzeugen.
Finde eine Lösung, um mit dem anderen Fahrtaster die
Geschwindigkeit wieder verringern zu können und auch rückwärts
mit variabler Geschwindigkeit fahren zu können.

robocar-05.ino
.....
|